The past few weeks have been spent working down in the robotics department at the University of Sheffield building a UAV (unmanned aerial vehicle, a.k.a drone). Ultimately, it will be used to make measurements of spectral reflectance of the ice surface in Greenland. It’s been great fun working in robotics – entering the lab is like walking onto the set of Robot Wars! UAV expert Owen McAree has been a huge help in developing the hardware and software for the drone – affectionately known as ‘albedrone’ in recognition of the albedo work it will enable – and we have now made successful test flights.
It began as an off-the-peg Steadidrone Mavrik quadcopter. However, we have made several modifications. We added a new brushless gimbal powered from the autopilot, machined a new mount that allowed us to better balance the camera and minimize the power being drawn by the gimbal, and added a GPS that can be used to trigger the image capture. We have also invested significant time into tuning the flight parameters and making it as stable and easy to fly as possible.

Flying can still be quite challenging, so I also invested in flight simulator software that interfaces with the real UAV controller, meaning I have been able to get the hang of flying safely without endangering the UAV. Significant time and effort has also gone in to writing a flight manual and logbooks for the batteries, build modifications and flight records.

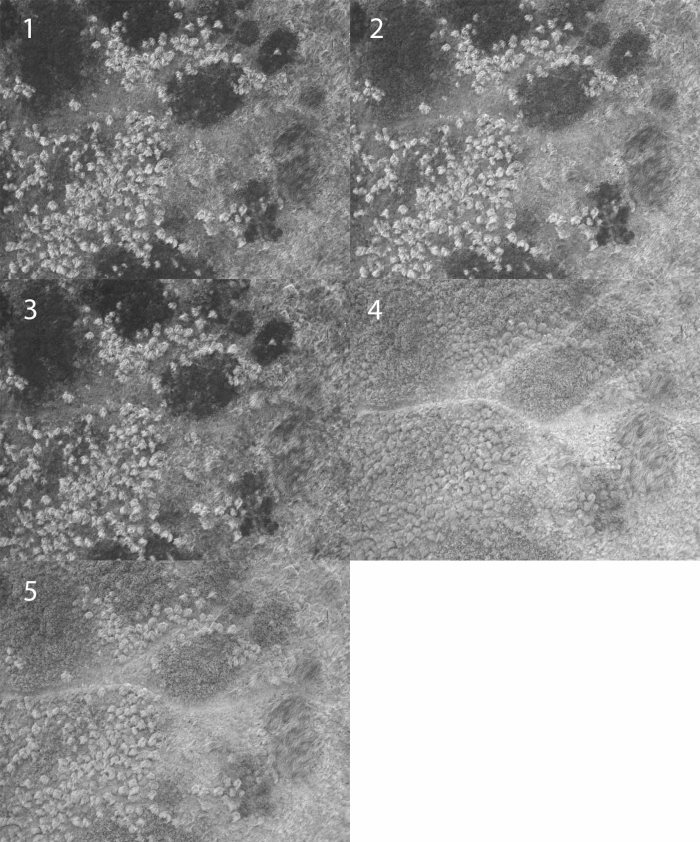
We have been flight-testing the UAV at the University of Sheffield’s High Bradfield site and have now successfully made a pre-programmed flight and captured overlapping images in five spectral bands. Some examples are shown below. These are interesting as they were captured over an area with a thick cover of green vegetation, perfect for NDVI analysis. Next jobs are to a) keep modifying the UAV to extend the flight time and perhaps add some additional sensors, and b) test the software that will stitch the images and analyse the spectral information…